Como proyecto final del quimestre nosotros debiamos armar un carro que sea controlado por bluetooth utilizando una aplicacion en el celular.
Para realizar este proyecto necesitamos:
- Cables jumper macho macho
- Cables jumper macho hembra
- Arduino UNO
- 2 puentes H
- 4 Motor reductores
- Modulo bluetooth
- Protoboard
- 3 baterias de 9 voltios
- Carton
- Cinta doble lado
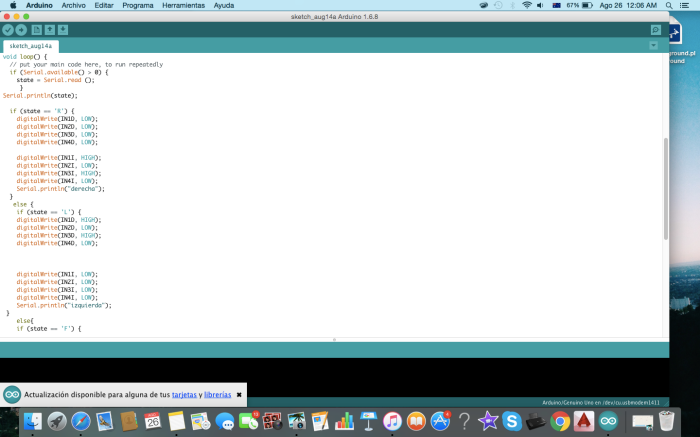
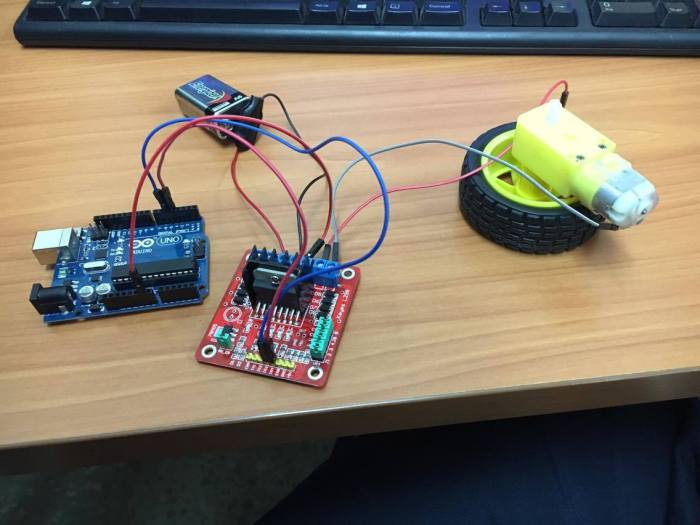
Para armar el carro comenzamos conectando los los puentes H a los motores y el arduino, para esto utilizamos el protoboard como base para poner los componentes y le pegamos los motores en la parte de abajo para que sea como un carro, le ponemos tambien las baterias. Luego escribimos la programacion para que se muevan los motores y la pasamos al arduino para ver si las conecciones estan bien. Una vez que es carro funciona bien pocedemos a descargar en el celular la aplicacion para controlar el carro por bluetooth. Luego modificamos la programacion aumentandole los comandos del bluetooth y la pasamos al arduino, finalmente conectamos el dispositivo bluetooth al carro y comprobamos que se pueda controlar con el telefono.

Una vez que nuestro carro sirve, podemos comenzar a hacerle una covertura en forma de carro para que se vea esteticamente agradable.