Un servomotor es un motor eléctrico pero con dos características especiales. Por un lado un servo nos permite mantener la posición que le indiquemos, siempre que esté dentro del rango de operación del propio dispositivo, y por otro lado nos permite controlar la velocidad de giro, podemos hacer que antes de que se mueva a la siguiente posición espere un tiempo.
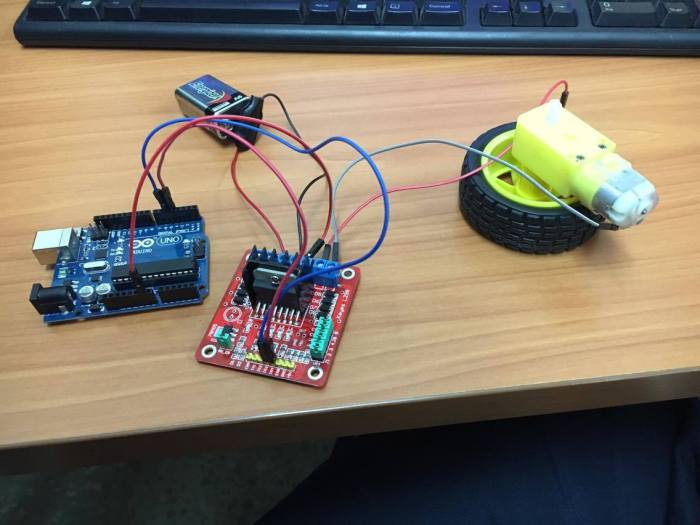
La forma de conectar el Servo Motor al arduino es de la siguiente manera.
- Cable rojo del servo motor es el positivo y va conectado al pin de 5V del arduino. EN caso de estar ocupado conéctelo al protoboard para tener más salidas de 5v.
- Cable negro del servo motor es el negativo puede ir conectado directamente al GND del Arduino o al protoboard donde tiene todas las GNDs referenciadas.
- Cable amarillo del servo motor al PIN 9 del Arduino o a cualquiera de los PINs marcados como PWM (Pulse Width Modulation, o modulación por ancho de pulsos), es por este cable donde se enviará la señal de control al servo motor para que vaya de 0º a 180º.

Cosas a tener en cuenta con este dispositivo, lo primero el ángulo de giro, en este caso nos permite hacer un barrido entre -90º y 90º lo que viene a ser un ángulo de giro de 180º. La precisión que nos permite es de grado en grado y en nuestro código en que ángulo se debe colocar del 0 al 180º.
 Usos de un Servomotor
Usos de un Servomotor
Robótica, brazos, zoom de una cámara de fotos, puertas automáticas de un ascensor, en las impresoras para el control de avance y retroceso del papel, máquinas herramientas, robots industriales, sistemas de producción, coches de radiocontrol, en el timón de los aviones, timones
Partes de un Servomotor
Un servomotor es un sistema compuesto por un
- Un motor eléctrico: es el encargado de generar el movimiento, a través de su eje.
- Un sistema de regulación: formado por engranajes, que actúa sobre el motor para regular su velocidad y el par. Mediante estos engranajes, normalmente ruedas dentadas, podemos aumentar la velocidad y el par o disminuirlas.
- Un sistema de control o sensor: circuito electrónico que controla el movimiento del motormediante el envío de pulsos eléctricos.
- Un potenciómetro: conectado al eje central del motor que nos permite saber en todo momento el ángulo en el que se encuentra el eje del motor.
Usos de un ServomotorRobótica, brazos, zoom de una cámara de fotos, puertas automáticas de un ascensor, en las impresoras para el control de avance y retroceso del papel, máquinas herramientas, robots industriales, sistemas de producción, coches de radiocontrol, en el timón de los aviones, timones
Partes de un Servomotor
Un servomotor es un sistema compuesto por un
- Un motor eléctrico: es el encargado de generar el movimiento, a través de su eje.
- Un sistema de regulación: formado por engranajes, que actúa sobre el motor para regular su velocidad y el par. Mediante estos engranajes, normalmente ruedas dentadas, podemos aumentar la velocidad y el par o disminuirlas.
- Un sistema de control o sensor: circuito electrónico que controla el movimiento del motormediante el envío de pulsos eléctricos.
- Un potenciómetro: conectado al eje central del motor que nos permite saber en todo momento el ángulo en el que se encuentra el eje del motor.