
Que es un motoreductor? Un motoreductor es un pequeño motor conectado a engranes los cuales terminan en un eje, provocando así la disminución en la velocidad de giro o en las revoluciones por segundo pero aumentando la fuerza o el torque del mismo y de esta manera poder transportar más peso que con un motor de velocidad.
Lo que compone el reductor de un motor son el eje original del motor y luego los engranes dentro de la carcaza, en este caso amarilla o plateada y finalmente uno o dos ejes de rotación lenta.

El motoreductor se puede conectar a una bateria colocando los cables en las patas de conexion del motor reductor, como no tiene polaridad, se puede conectar en cualquier pata.
Para poder cambiar la polaridad y que la rueda gire en otro sentido sin necesidad de desconectarlo, podemos usar un puente H.
Un Puente en H es un circuito electrónico que permite a un motor eléctrico DC girar en ambos sentidos, avance y retroceso. Son ampliamente usados en robótica y como convertidores de potencia. Los puentes H están disponibles como circuitos integrados, pero también pueden construirse a partir de componentes discretos.
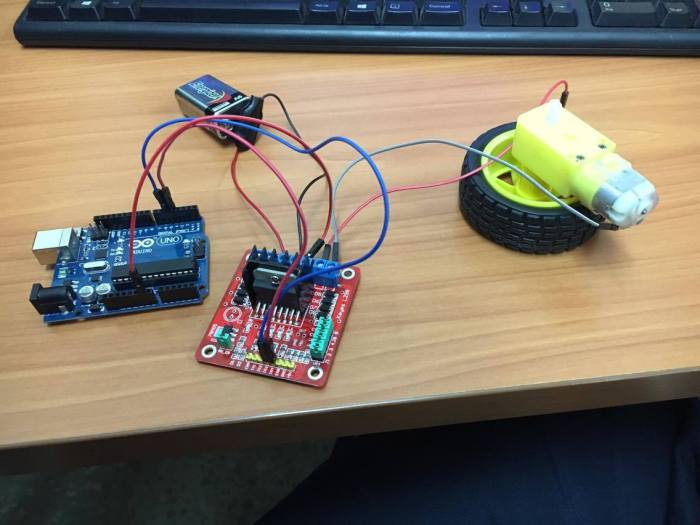
La forma de conectar el puente H es la siguiente:

En Motor A y B hay dos ranuras donde iran cable macho - macho y a su vez iran conectadas al motorreductor. En la parte de 6-12V ira conectado el positivo de la bateria de 9v. En el GND ira conectado el negativo de la bateria de 9v. Y en IN1, IN2, IN3, IN4 iran conectado cables macho - hembra donde la hembra va conectada a estos pines y la parte del macho a los pines del arduino que lo veremos más adelante.
Para esta practica usaremos:
- 2 Cables jumper macho-macho
- 2 cables jumper hembra-macho
- Un motor reductor
- Un Arduino UNO
- Un Puente H L298N
No hay comentarios:
Publicar un comentario